Renk Algılayan Robot Kol

Arduino Robot Kol Renk Algilanan Ve Renkleri Ayiran Robot Kol Ezzybotarm Mk2 Youtube
Pic16f84 Renk Algilayan Robot Kol Projesi Jal Ile Elektronik Devreler Projeler

Renk Ayiran Robot Kol Youtube

Robot Kol Ile Ayrim Yapan Bant Sistemi Projesi 3 Berk Arat

Robot Kol Ile Ayrim Yapan Bant Sistemi Projesi 3 Berk Arat

Renk Algilayan Robot Kol Projesi Youtube
C programlama dili kullanılarak yazılım kısmı gerçekleştirilmiştir.
Renk algılayan robot kol. Projemizin son aşaması olan 3 bölüm ile devam ediyoruz. Akıllıtelefon ile robot kol projesinin kullanımalanları. Bu yazımızda android işletim sistemli akıllı cihazlar tarafından kontrol edilebilen robot kol uygulaması yapacağız. Lisans bitirme projesi onay formu 228462 özge ünal 228404 ahmet sarikahraman 228458 ġlker ġanli tarafından doç.
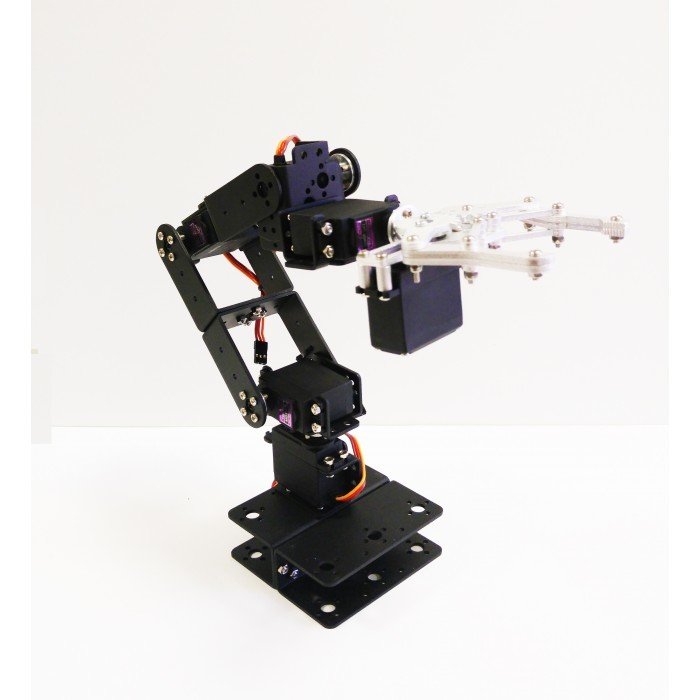
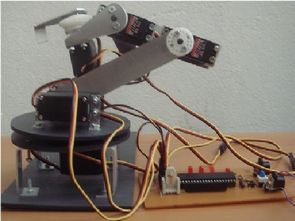
Robot kolun mekanik platformu solidworks 2004 programında tasarlanmış ve simule edilmiştir. Ayten atasoy yönetiminde. Projemizde robot kol tasarımının yapılması ve onu yürütebilecek bir mekanizma yaptık. 3 boyutlu akıllı arduino robot kol yapımı merhaba arkadaşlar.
Ayten atasoy mayıs 2014 trabzon. Robot kol insanın kol fonksiyonlarından esinlenmiģ mekanik bir yapıdır. Mikrodenetleyiciyle renk ayiran robot kol tasarimi 228458 ġlker ġanli 228404 ahmet sarikahraman 228462 özge ünal danıģman doç. Mehmet can tuncer eda yildiz ersin koşar mikro denetleyici pic bilgilerinin yanı sıra robot yazılım jal komutları mekanik aksam hakkında bilgiler ve fazlası.
Bu yazılım sayesinde bilgisayar arabirimi kullanılarak robot kol. Robot hizlari nite olarak tanimlanir ve 0 01 ila 327 67 sinirlari arasindadir move point. Istenilen 5 rengi alıgılayıp ayriran robot kol arduino pro mini ile yapıldı. Nce birinci hedefe daha sonra ikinci hedefe ulasacaktir.
05314705670 ve yaptırmak istedğiniz bir. Renk hassasġyetlġ robot kol bġtġrme tezġ hazırlayanlar emrullah olam 2011010226020 ġlyas karaaslan 2011010226053 tez danıģmanı doç dr. Akıllıtelefonlar ile kontrol edilebilen akıllıev sistemleri akıllıtelefon ile kontrol edilebilen hobby rc araçlar dronlar tekneler akıllısistem tasarımlarındantelefonumuza geri bildirimler sağlamak. Sistemin robot kol ile birlikte çalışması ve sensörlerin çalışma yapısı ve programlanmasına değineceğimiz bu yazı ile projemizi başarıyla bitireceğiz.
Robot kol halihazirda bulunulan konumdan point olarak tanimlanmis yeni noktaya hareket edecektir. Sonraki aşamada çizimlere uygun bir şekilde pleksi glass lazer tipi cnc tezgahında kesilmiştir. Robot kol dogrusal olarak tanimlanmis iki noktaya hareket edecektir. Biz buna bir cismi tutma ve baģka bir yere bırakma eylemlerinin yanı sıra yürüme eylemi de ekleyerek bilgisayar yardımıyla kontrol edilebilmesini hedefledik.

Arduino Ile Renklerine Gore Urunleri Ayiklama Robotu Yapimi

Tcs3200 Ve Arduino Ile Renk Algilama Uygulamasi

Arduino Ile Renklerine Gore Urunleri Ayiklama Robotu Yapimi
Https Silo Tips Download Tc Karadenz Teknk Nverstes Mhendislik Fakltesi Elektrik Elektronik Mhendislii Bl 4

Pic16f84 Renk Algilayan Robot Kol Projesi Jal Ile Elektronik Devreler Projeler

Robot Kol Ile Ayrim Yapan Bant Sistemi Projesi 3 Berk Arat

Mdf Robot Kol Kiti Stoktan Hemen Kargo Robocombo Com

Arduino Renk Algilama Uygulamasi Proje Hocam
6 Eksen Robot Kolu 6 Dof Servo Robot Kolu Robot Malzemeleri 493 24 Tl Satin Al

Robot Kol 4 Eksenli Market Proje Hocam

Arduino Ile Renk Algilama Sensoru Uygulamasi

Renk Ayiran Robot Kol Youtube

Arduino Ile Renk Algilama Sensoru Uygulamasi

Arduino Ve Android Kontrollu Robot Kol Yapimi Proje Hocam

Yuvali Renk Algilayici Sensor Tcs34725 Satin Al Robotistan Com
Robot Kol Elektronik Devreler Projeler

Robot Kol Projesi Teknoloji Ve Tasarim Dersi Yapalim Yapalim Net Satilik Robotlar Duzen Kusagi Kurgu Kusagi Yapim Kusagi Proje Icat Bulus Bilim Insanlari Patent

Robotik Proje Kitleri Robimek

Pleksiglas Robot Kol Plastik Parcalari Ucuz Fiyata Al Robocombo

Rgb Renk Algilayici Sensor Tcs34725 Satin Al Robotistan Com

Arduino Robot Kol Www Robotdevreleri Com

Hazir Projeler Robimek Teknoloji Marketi

Elvan Icinde Ikinci El Satilik Renk Ayiran Robot Kol Letg
Robot Kol Elektronik Devreler Projeler

Arduino Renk Algilama Uygulamasi Proje Hocam
Rgb Renk Algilayici Sensor Tcs34725 Satin Al Robotistan Com

Rgb Renk Algilayici Sensor Tcs34725 Rgb Renk Algilayici Sensor Tcs34725

Arduino Ve Android Kontrollu Robot Kol Yapimi Proje Hocam
Rgb Renk Algilayici Sensor Tcs34725 Satin Al Robotistan Com

Arduino Tcs3200 Renk Sensoru Kullanimi Berk Arat

Arduino Ve Android Kontrollu Robot Kol Yapimi Proje Hocam

Renk Sensorunun Calismasi Bursa Coskunoz Egitim Vakfi Color Algilayici Optik Nedir Nasil Calisir Youtube

Aluminyum Robot Kol Seti 6 Dof Eklem

Arduino Ile Engel Algilayan Robot Teknoloji Ve Tasarim Dersi Yapalim Yapalim Net Satilik Robotlar Duzen Kusagi Kurgu Kusagi Yapim Kusagi Proje Icat Bulus Bilim Insanlari Patent

Arduino Robot Kol Www Robotdevreleri Com

Sayfa 9 Elektrik Gen Tr
